


新闻快讯丨中国电池工业协会八届五次理事会暨电池护照工作推进会圆满举办
2024-04-24
【概要描述】事实上,对于一些仿真模型,特别是那些颗粒较少的模型,可以不借助其它软件,仅在仿真软件中就能对整个系统进行建模和仿真,在节约成本的同时,更便捷地提高产品的研发质量。




【概要描述】事实上,对于一些仿真模型,特别是那些颗粒较少的模型,可以不借助其它软件,仅在仿真软件中就能对整个系统进行建模和仿真,在节约成本的同时,更便捷地提高产品的研发质量。
马铃薯与多体仿真的“江湖轶事”
多体仿真(MBS)适用于机械系统运动学和动力学性能分析。如果外部作用力对整个系统性能有明显影响,只考虑机械部件是不够的。MBS的目标是创建产品的系统模型,并考虑所有相关的力。
农业机械公司格立莫(Grimme)研发并制造马铃薯和甜菜种植机械。在本案例中,马铃薯离散颗粒在机器内运动的性能和载荷是非常重要的。对这种问题的一种常见方法是使用商业“离散元方法(DEM)”软件和Simpack进行联合仿真。为了避免额外的软件许可证成本和接口开发,在本仿真场景的范围内,研究了仅用Simpack仿真整个模型的可能性。使用“多边形接触方法(PCM)”定义所有物体之间的接触特性。

多体仿真:机遇与挑战并存
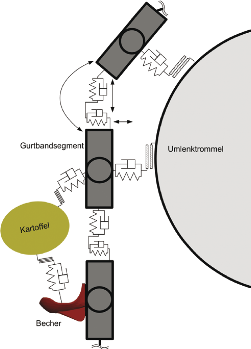
本次可行性研究以马铃薯播种机为例而展开。为了建立这个模型,有必要建立一个与马铃薯颗粒流相互作用的橡胶弹性皮带,且皮带由电动振动装置进行激励,皮带的振动使马铃薯种子被分离到各自的勺杯中。
使用Simpack这个功能强大的MBS(多体系统)软件可以轻松实现机械部件的建模。主要问题在于,在Simpack中使用接触力元是否能够充分地表示大量类似颗粒物体之间的接触,其中一些还具有复杂的几何结构。
另一个挑战也随之浮现:在尽管模型有很多自由度的前提下,是否能通过使用适当的参数以及优化的求解器设置,将计算时间保持在可接受的范围内。

图1: 土豆播种机的多体仿真模型
01/常规模型设置
高弹性皮带的建模是比较困难的挑战之一。通过把皮带离散为多个刚体段来实现(见图2)。大量的离散段可以更好地表现皮带的特性,并减少由多边形效应引起的带轮的振动激励,不过需要在离散段数和计算时间之间找到恰当的平衡。各离散段之间通过衬套力元耦合。为了后续定义皮带段和带轮之间以及皮带段和土豆颗粒之间的接触力,有必要使用长方体和圆柱体对这些离散段进行建模。
所有和土豆颗粒有接触的机械部件也需要在模型中建立。在本案例中,机械部件指的是拾取室和向下运动的通道。这些部件几何图形从CAD文件中获取并转换为obj格式文件。然后,机械部件和颗粒体之间的接触力可以使用PCM接触方法建模。
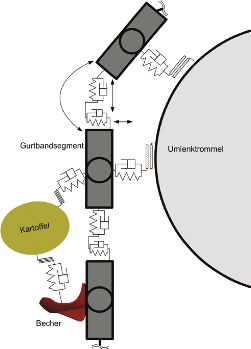
图2: 皮带建模示意图
02/接触定义
本模型中使用了两种不同的接触类型。一种是曲线-曲线接触,用于定义皮带段和带轮之间的接触。与其它几何接触类型相比,这种接触类型的计算时间能明显缩短。由于曲线-曲线接触只能在具有曲面的接触部件之间实现,因此每个皮带段需要含有上述的小圆柱体曲面。
此外,需要定义颗粒之间以及颗粒与机器部件之间的接触,这可以使用Simpack软件PCM方法实现。任何几何都可用于定义接触面,要求是接触面需要是三角形网格形式的文件格式,如obj、stl等。PCM接触允许接触面之间有多个接触,这是计算颗粒接触的先决条件。这种接触方法的另一个优点是效率的碰撞检测,因为不接触的表面对计算时间的影响很小。
这个播种机模型中接触力元的总数取决于颗粒的数量和皮带的离散程度。该模型含有108个皮带段和24个土豆颗粒,共有4309个接触力元。
03/使用脚本生成模型数据
由于所需的力元数量特别多,如果使用标准的Simpack 界面操作,生成模型将非常耗时。因此,为了自动生成Simpack的模型文件,一个效率高的、便捷的脚本被开发了出来。
所有的模型参数,如皮带速度和土豆数量,都是在脚本中预定义的。随后,执行该脚本生成用于仿真软件生成的模型下文件,这些文件生成以后可以直接运行。对模型的修改总是需要在脚本中修改。在创建仿真软件新模型时,通常可以采用脚本,这能大大减少了建模所需的时间。
04/仿真场景
仿真软件中的SODASRT 2积分器适用于所有的仿真过程。事实证明,将积分器步长限制在万分之一秒是效率的,这样可以可靠地检测所有接触事件,并避免对积分器步长的较大更改。
首先利用仿真软件运行仿真用于调整模型中的接触参数。通过各种实际的跌落碰撞试验,确定了马铃薯与各种部件材料之间的实际接触特性。这些试验确定碰撞力过程和恢复系数,与马铃薯的质量、跌落高度和接触材料等因素有关。然后,利用仿真软件研究的主要目的是优化计算时间,以实现尽可能多的颗粒数量仿真。
再然后通过分析机械参数和部件几何参数的变化,优化颗粒流运动过程,降低土豆颗粒的受力。
05/试验结果
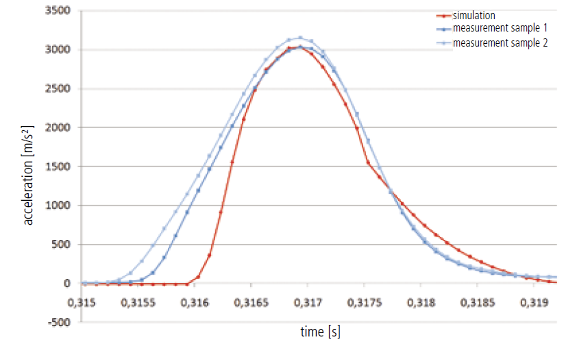
在一个简单的跌落试验中,对比仿真软件中的结果和实测的碰撞力或碰撞加速度曲线,显示二者具有良好的一致性。图3显示了当一个100克的土豆从50厘米的高度落在钢表面上时的碰撞变化曲线。
在后续的产品开发模型分析中,作用于土豆颗粒的碰撞力对Grimme公司来说是非常重要的。所有新研发产品的一个关键目标是保护土豆。
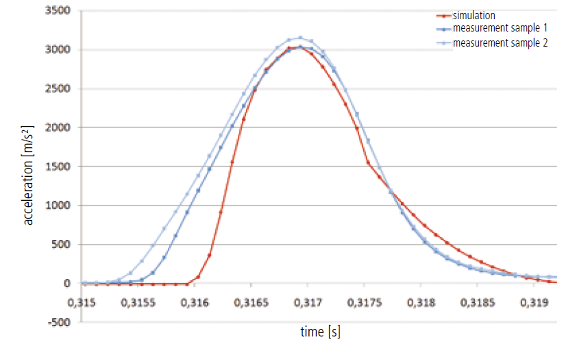
图3: 试验(蓝色)和仿真(红色)的碰撞加速度曲线对比
利用仿真软件进行的仿真模型质量的进一步评估标准是直接观察并对比颗粒流的运动情况。在试验和仿真过程中,除了马铃薯外,还使用了高尔夫球,因为高尔夫球具有更好的可比性和均匀的颗粒特性。通过台架试验获得的高速图像作为土豆颗粒的参考。
图4为台架试验高速成像图,左侧显示了仿真过程的同样状态。通过比较这个和其它视频,可以确定仿真模型中颗粒非常真实的运动性能。值得注意的是,即使是接触参数的微小变化也会对产品运行产生显著影响。

图4: 仿真和试验的可视化对比
总结
以土豆播种机为例,本文论证了Simpack在颗粒模型建模和仿真中的适用性。通过脚本的使用,大大缩短了建模时间。此外对比发现,仿真结果与试验测试值具有很高的一致性。同时考虑了作用在颗粒上的碰撞力随时间推移而产生的变化以及整个颗粒流的运动性能。

事实上,对于一些仿真模型,特别是那些颗粒较少的模型,可以不借助其它软件,仅在Simpack中就能对整个系统进行建模和仿真,在节约成本的同时,更便捷地提高产品的研发质量。
扫二维码用手机看
南京复创 苏ICP备18062552号-1 网站建设:中企动力 南京





 电话
电话 咨询
咨询 Top
Top